Example
The following example was used to map a hallway:
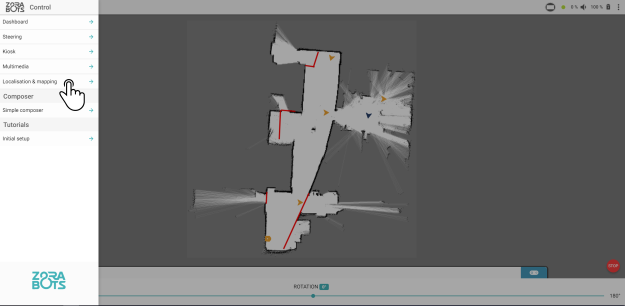
A few key interest points on the map:
-
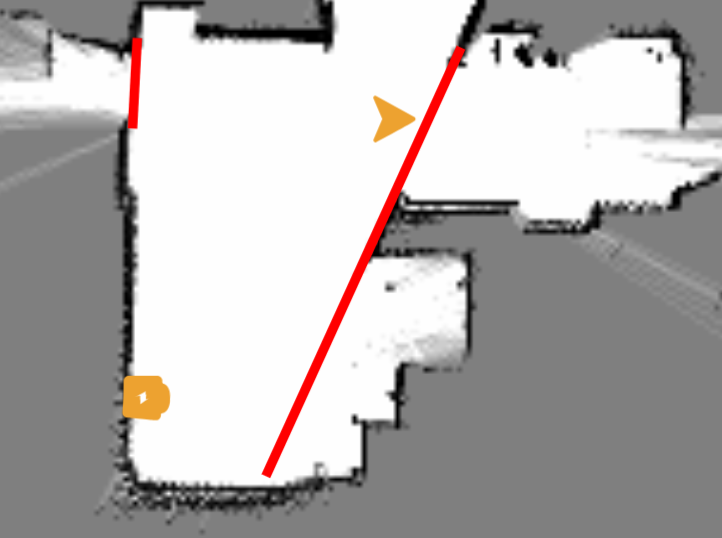
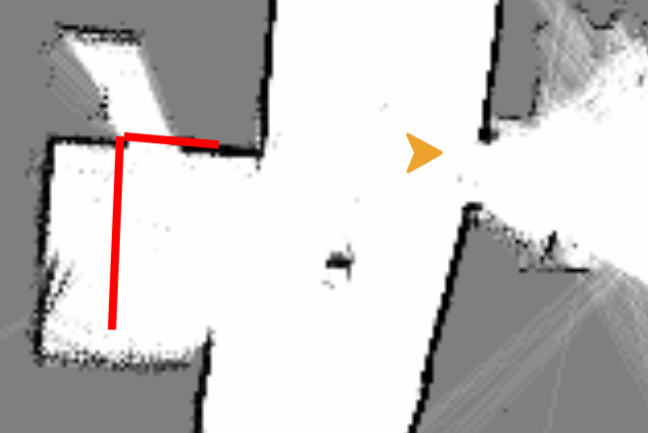
Safety-zones have been added to make sure the device doesn’t enter areas where doors might open.

-
An obstacle has been placed in the middle of the main hallway
-
Currently, the device is stationed in a room that hasn’t been fully mapped yet.
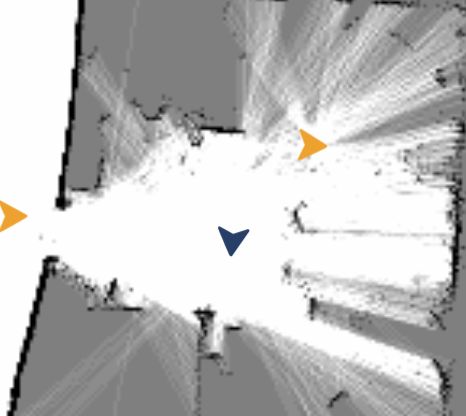
-
POIs have already been saved on the map (including a charging station).