List of input-peripherals
The following devices have been installed on Zora to detect input and/or its environment:
Microphones
Zora has been installed with microphones into its head in the following locations:
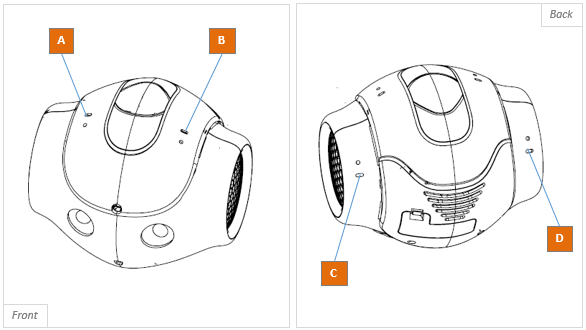
These microphones have the following specifications:
| Sensor | Specification |
|---|---|
Sensitivity |
250mV/Pa +/-3dB at 1kHz |
Frequency range |
100Hz to 10kHz (-10dB relative to 1kHz) |
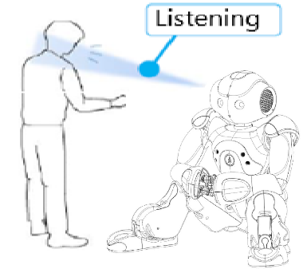
Listening cone
The microphones have been calibrated so Zora only listens if the user is standing in front of them:
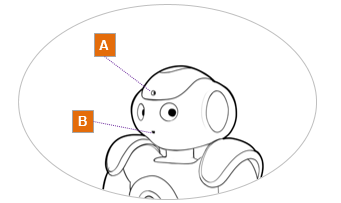
Video-camera
Zora has been installed with the following cameras:
These cameras have the following specifications:
-
Camera
-
Model: OV5640
-
Type: SoC CMOS image sensor
-
-
Imaging array
-
Resolution: 5 Mp
-
Optical format: 1/4 inch
-
Active Pixels (HxV): 2592 x 1944
-
-
Sensitivity
-
Pixel size: 1.4µm * 1.4µm
-
Dynamic range: 68db@8x gain
-
Signal/Noise ratio: 36 dB
-
Responsivity: 600 mV / Lux-sec
-
-
Output
-
Camera output: 640*480@30fps or 2560*1920@1fps
-
Data format: YUV and RGB
-
Shutter type: Rolling shutter
-
-
View
-
Field of view: 67.4° DFOV (56.3° HFOV,43.7° VFOV)
-
Focus type: Auto focus
-
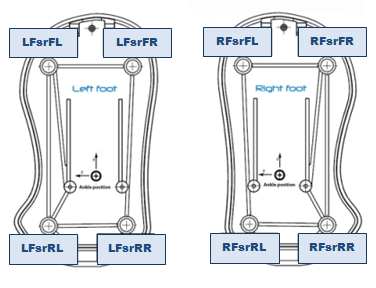
Force Sensitive Resistors
Zora is equipped with sensors in the bottom of the feet to detect how much force the body is exerting on the surface of the floor.
-
Range: 0 - 25 N
Inertial unit
Zora is equipped with an inertial unit in the center of the body to detect changes in position based on gravity.
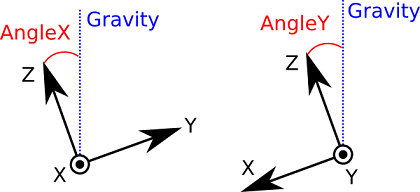
The inertial unit consists of 2 components:
-
Gyrometer: 3-axis, angular speed of ~500°/s
-
Accelerometer: 3-axis, detects acceleration of ~2g.
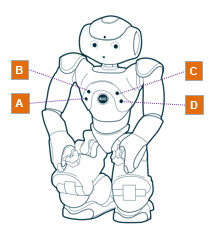
Ultrasonic sensors
Zora is equipped with ultrasonic sensors (sonar) in the chest to detect obstacles in front. These sensors are a set of 2 transmitters and 2 receivers.
-
Specifications
-
Frequency: 40 kHz
-
Resolution: 1 cm - 4 cm
-
Detection range: 0.20 - 0.80 m
-
Effective cone: 60°
-
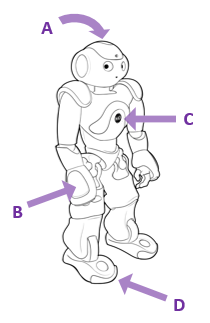
Tactile sensors
| Tactile sensors only need to touched gently to send a response back to the robot. Bumpers and buttons need to be pressed to send information back to Zora. |
Zora is equipped with the following sensors that the user can touch or press:
-
Tactile head sensors (front, middle and back)
-
Tactile hand sensors (left and right arm)
-
Chestbutton
-
Foot bumpers (left and right leg)