Getting started
This section describes how to start using your Cruzr robot.
| Please keep the original box in case the robot ever needs to be shipped. |
Features
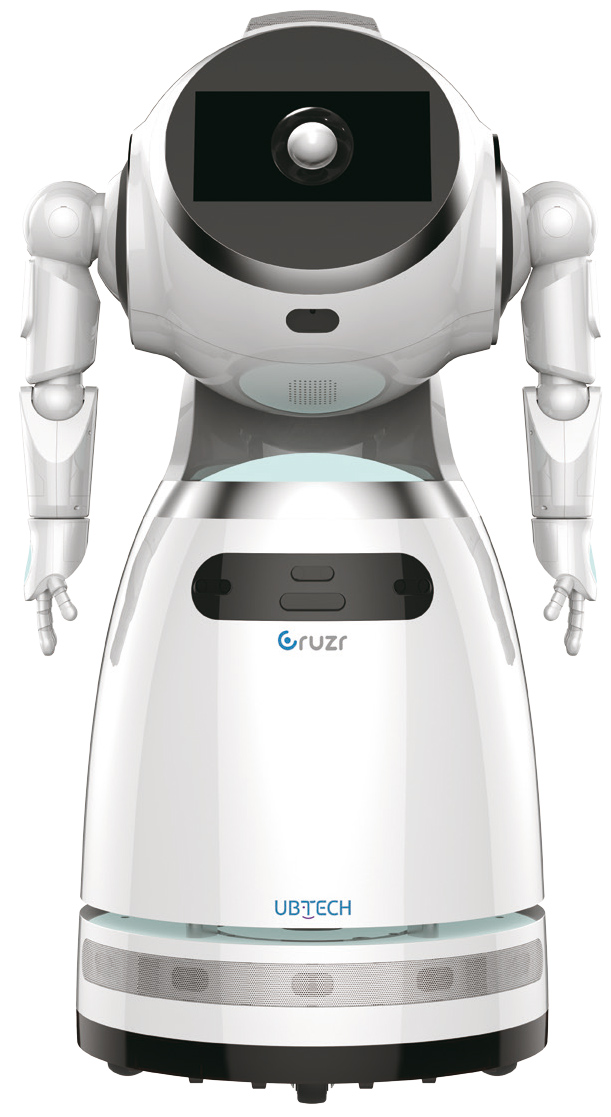
Cruzr robot
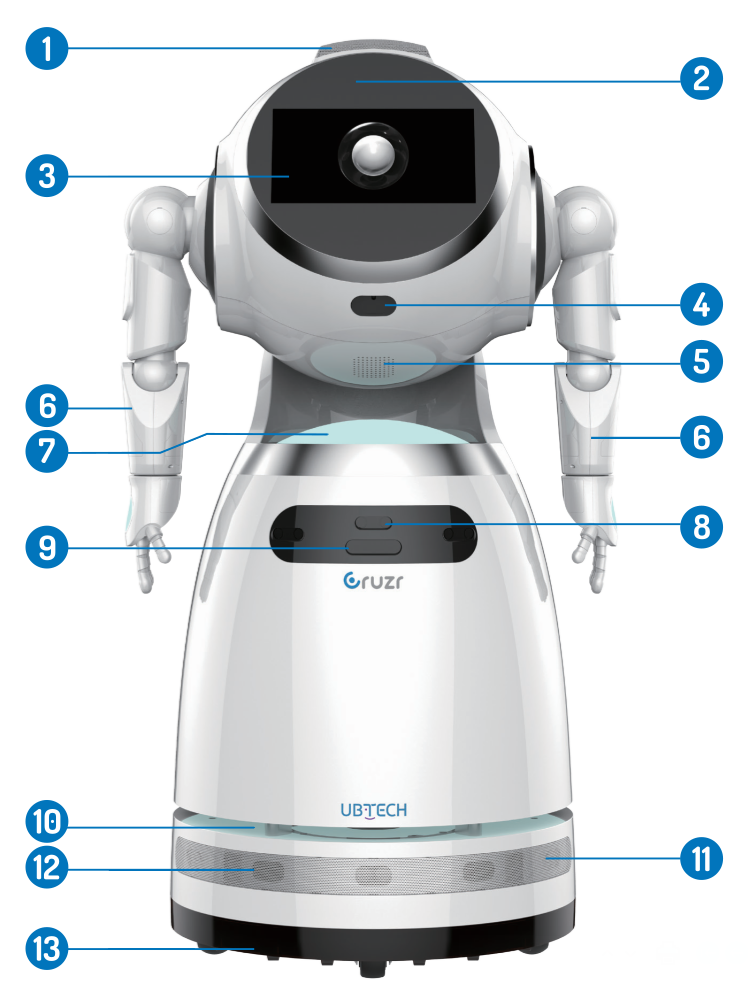
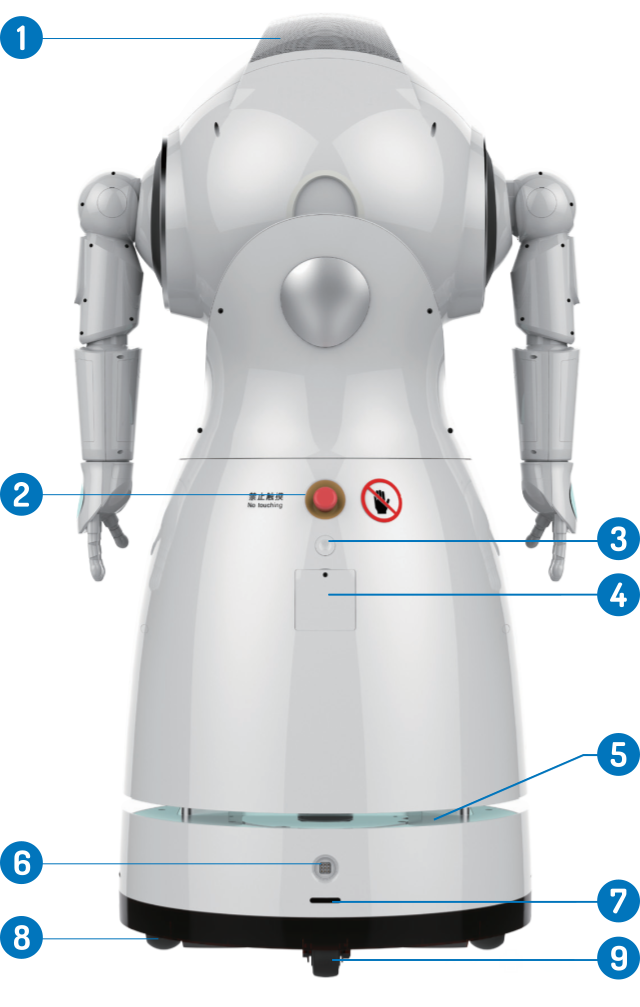
Front view
-
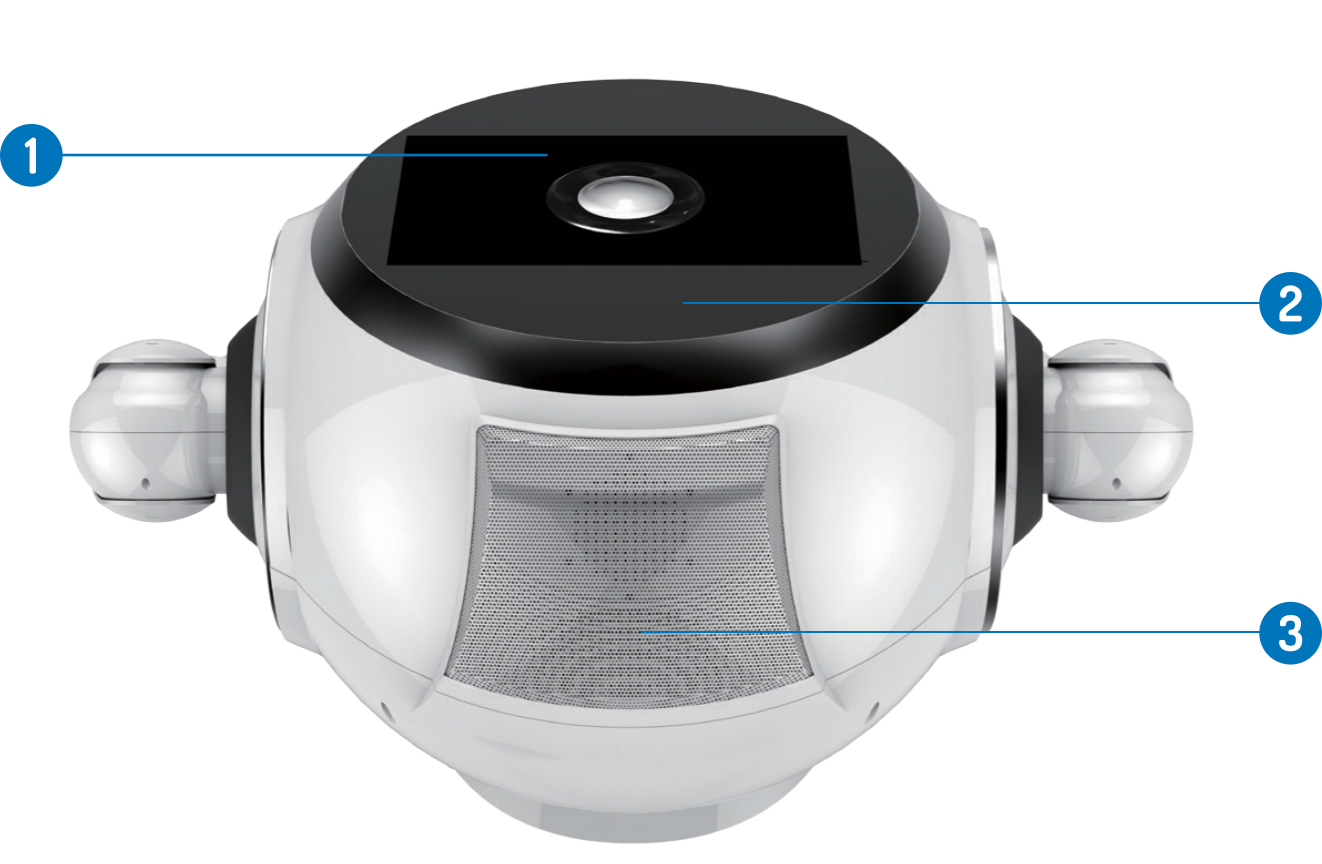
Microphone Array
-
Hi-Res Camera (13 megapixels)
-
HD Touchscreen
-
TOF Sensor (only on models with serial number above XXX)
-
Speaker (tablet)
-
E-skin
-
Indicator Light
-
Ultrasonic Sensor
-
RGBD camera
-
Laser Radar
-
Speaker (lidar)
-
Ultrasonic sensor
-
Hub Motor

Charging Dock
Charging Dock Front View
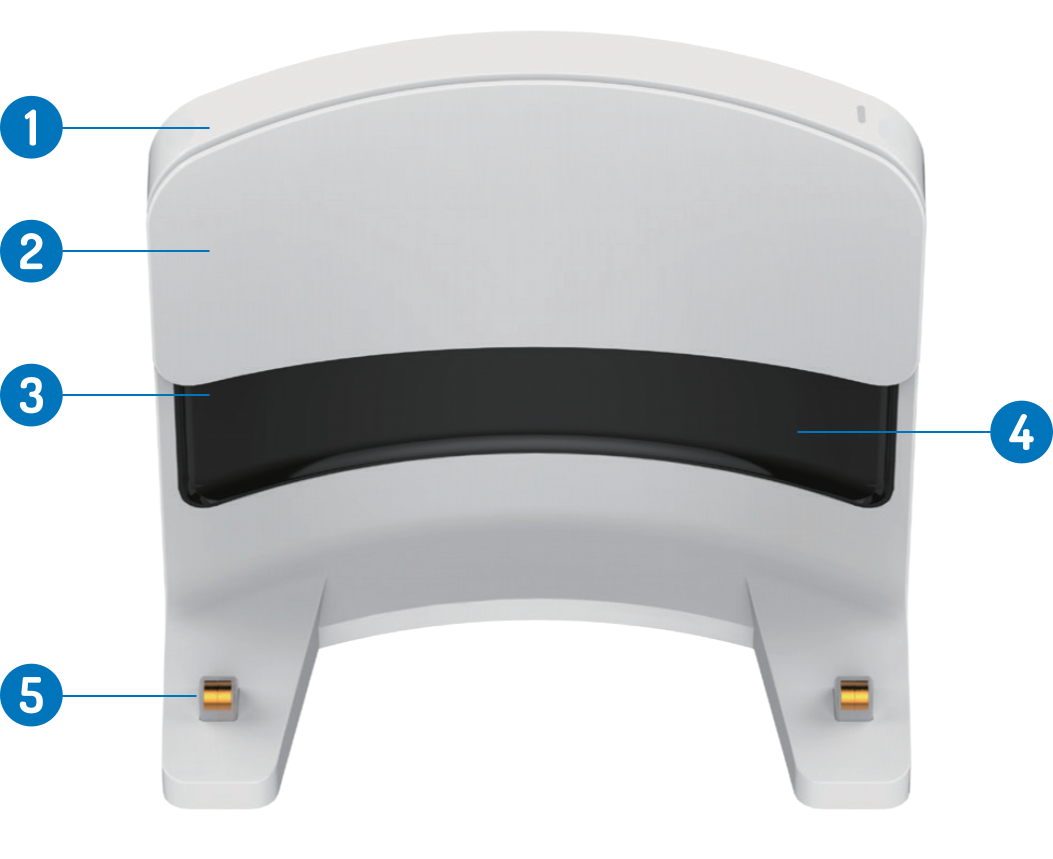
-
LED Indicator Light
-
Radar Identification Board
-
Infrared Emitter
-
HALL Sensor
-
Electrode Contact
Setting up the Charging Dock


Installation
-
Connect the adapter with the charging dock and place it against a wall.
-
The floor should be smooth and dry. A place where not a lot of people pass by is recommended.
-
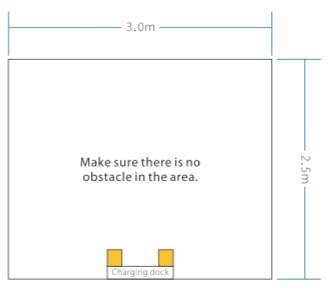
Placing the charging dock in an area with at least 2.5m of space in front and 1.5m of space on each side is recommended, as shown in the figure below.
-
Avoid having smooth white walls within 3.5m in front of the charging dock.